
Introduction
A remote-controlled robot with autonomous human detection capability
Robotics doesn’t always require complex machinery sometimes the most valuable projects begin with a simple idea: detect human presence and respond intelligently.
This embedded systems project focuses on building a mobile robot that can be remotely controlled and also autonomously react when a human is detected.
Objective
Design a robot that:
- Moves via remote control
- Detects human presence using a PIR sensor
- Automatically stops and alerts when detection occurs
This concept is applicable to security, search & rescue, and assistive automation.
System Architecture
The robot was built using:
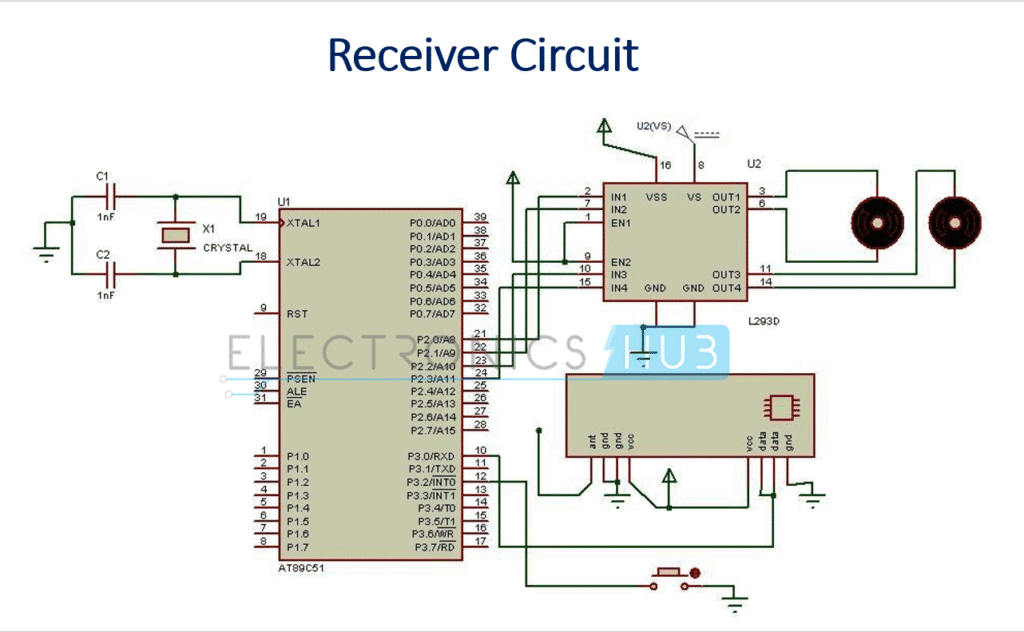
AT89S51 Microcontroller – Core controller
DC Motors + L293D Motor Driver – Handles movement
RF Transmitter & Receiver Modules – Enables remote wireless control
PIR Sensor – Detects human infrared radiation
Buzzer – Provides audio alert on detection
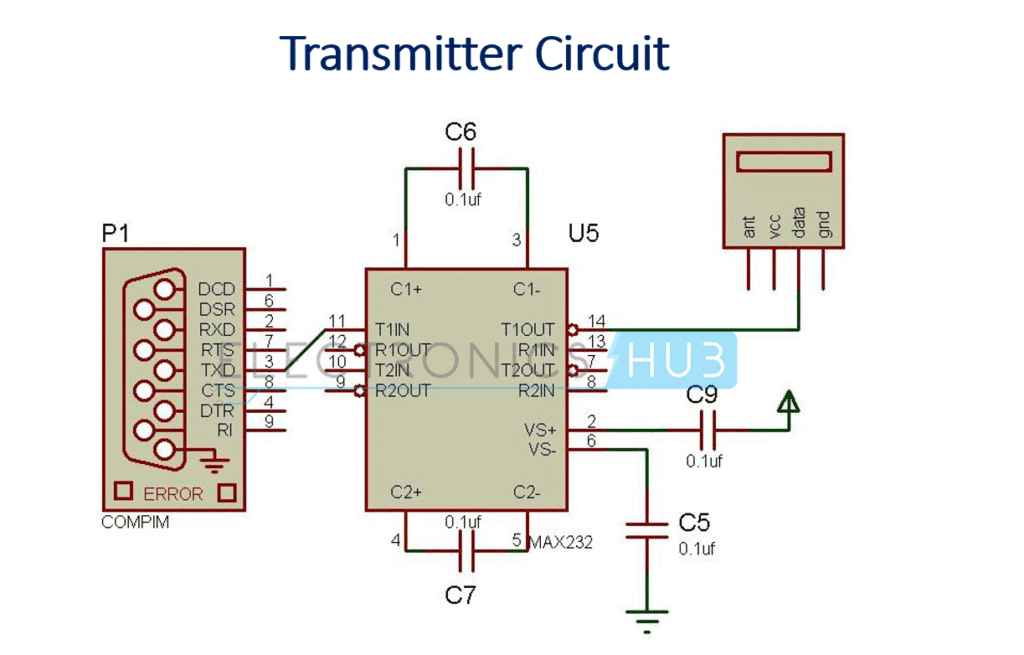
MAX232 IC – Serial communication with PC
How It Works
1. Remote Control
Commands (F, B, L, R) were sent from a PC through a serial terminal.
These commands passed through MAX232 and reached the microcontroller.
2. Movement Control
The microcontroller interpreted commands and activated motors via L293D for forward, backward, and turning motions.
3. Human Detection
The PIR sensor continuously scanned the surroundings.
When it detected human infrared signals, it triggered an interrupt.
4. Autonomous Response
On detection:
- Motors stop immediately
- Buzzer activates
- Robot enters an alert state
This allowed the robot to function both remotely and autonomously.
Conclusion
The project demonstrated practical embedded system integration microcontrollers, sensors, RF control, and mobility.
Programming the microcontroller brought the logic to life, resulting in a responsive prototype capable of guided navigation and intelligent reaction.
It forms the foundation for more advanced robots where remote operation and autonomous sensing must work together.
How It Worked
1. Remote Control Interface
The robot received commands from a PC via a serial interface.
The MAX232 IC converted voltage levels for communication.
Commands like:
'F'→ Move Forward'B'→ Move Backward'L'→ Turn Left'R'→ Turn Right
These commands were sent through a terminal program.
2. Motor Control
The microcontroller interpreted the received command.
It then activated the DC motors via the L293D motor driver, providing smooth and directional movement.
3. Human Detection
The PIR sensor continuously monitored the surroundings.
When infrared radiation from a human was detected, it triggered an interrupt signal to the microcontroller.
4. Autonomous Response
Upon PIR detection:
The microcontroller immediately halted all motor activity.
The buzzer was activated to provide an audible alert.
This ensured the robot could safely interact with environments where human presence mattered.
Conclusion & Outcome
This project successfully combined:
Microcontroller programming
Sensor integration
RF communication
Motor control
Real-time interrupt handling
The result was a robot capable of both remote navigation and autonomous safety response.
Building this prototype demonstrated how foundational embedded components can work together to form intelligent, responsive mechatronic systems. It also highlighted the practical challenges of integrating hardware and software everything from circuit assembly to firmware programming.
This project forms a strong base for future advancements such as:
Fully autonomous patrol robots
Obstacle avoidance systems
Advanced human–robot interaction models